

This paper proposes a new non-intrusive trigonometric polynomial approximation interval method for the dynamic response analysis of nonlinear systems with uncertain-but-bounded parameters and/or initial conditions. This method provides tighter solution ranges compared to the existing approximation interval methods. We consider trigonometric approximation polynomials of three types: both cosine and sine functions, the sine function, and the cosine function. Thus, special interval arithmetic for trigonometric function without overestimation can be used to obtain interval results. The interval method using trigonometric approximation polynomials with a cosine functional form exhibits better performance than the existing Taylor interval method and Chebyshev interval method. Finally, two typical numerical examples with nonlinearity are applied to demonstrate the effectiveness of the proposed method.
[1] Chen H H. Stability and chaotic dynamics of a rate gyro with feedback control under uncertain vehicle spin and acceleration. J Sound Vib, 2004, 273: 949-968 CrossRef Google Scholar
[2] Cheng H, Sandu A. Uncertainty quantification and apportionment in air quality models using the polynomial chaos method. Environ Modell Software, 2009, 24: 917-925 CrossRef Google Scholar
[3] Astill C J, Imosseir S B, Shinozuka M. Impact loading on structures with random properties. J Struct Mech, 1972, 1: 63-77 CrossRef Google Scholar
[4] Sun T C. A finite element method for random differential equations with random coefficients. SIAM J Numer Anal, 1979, 16: 1019-1035 CrossRef Google Scholar
[5] Li J, Liao S. Response analysis of stochastic parameter structures under non-stationary random excitation. Comput Mech, 2001, 27: 61-68 CrossRef Google Scholar
[6] Chen S H, Liu Z S, Zhang Z F. Random vibration analysis for large-scale structures with random parameters. Comput Struct, 1992, 43: 681-685 CrossRef Google Scholar
[7] Yakov B H, Elishakoff I. Convex Models of Uncertainty in Applied Mechanics. Amsterdam: Elsevier. 1990, Google Scholar
[8] Yurilev C C, Heriberto?R F. Comparation between some approaches to solve fuzzy differential equations. Fuzzy Set Syst, 2009, 160: 1517-1527 CrossRef Google Scholar
[9] Nieto J J, Khastan A, Ivaz K. Numerical solution of fuzzy differential equations under generalized differentiability. Nonlinear Anal Hybrid Syst, 2009, 3: 700-707 CrossRef Google Scholar
[10] Bede B, Rudas I J, Bencsik A L. First order linear fuzzy differential equations under generalized differentiability. Inform Sci, 2007, 177: 1648-1662 CrossRef Google Scholar
[11] Hanss M. The transformation method for the simulation and analysis of systems with uncertain parameters. Fuzzy Set Syst, 2002, 130: 277-289 CrossRef Google Scholar
[12] Qiu Z, Wang X. Comparison of dynamic response of structures with uncertain-but-bounded parameters using non-probabilistic interval analysis method and probabilistic approach. Int J Solid Struct, 2003, 40: 5423-5439 CrossRef Google Scholar
[13] Liu N, Gao W, Song C, et al. Interval dynamic response analysis of vehicle-bridge interaction system with uncertainty. J Sound Vib, 2013, 332: 3218-3231 CrossRef Google Scholar
[14] Moore R E. Interval Analysis. Englewood Cliffs: Prentice-Hall. 1966, Google Scholar
[15] Jackson K R, Nedialkov N S. Some recent advances in validated methods for IVPs for ODEs. Appl Numer Math, 2002, 42: 269-284 CrossRef Google Scholar
[16] Nedialkov N S, Jackson K R, Corliss G F. Validated solutions of initial value problems for ordinary differential equations. Appl Math Comput, 1999, 105: 21-68 CrossRef Google Scholar
[17] Nedialkov N S. Computing Rigorous Bounds on the Solution of An Initial Value Problem for An Ordinary Differential Equation. Dissertation for the Doctoral Degree. Toronto: University of Toronto. 1999, Google Scholar
[18] Hoefkens J. Rigorous Numerical Analysis with High-Order Taylor Models. Dissertation for the Doctoral Degree. Michigan: Michigan State University. 2001, Google Scholar
[19] Makino K, Berz M. Taylor models and other validated functional inclusion methods. Int J Pure Appl Math, 2003, 4: 379-456 Google Scholar
[20] Qiu Z, Wang X. Parameter perturbation method for dynamic responses of structures with uncertain-but-bounded parameters based on interval analysis. Int J Solid Struct, 2005, 42(18): 4958-4970 CrossRef Google Scholar
[21] Qiu Z, Ma L, Wang X. Non-probabilistic interval analysis method for dynamic response analysis of nonlinear systems with uncertainty. J Sound Vib, 2009, 319: 531-540 CrossRef Google Scholar
[22] Wu J, Zhao Y Q, Chen S H. An improved interval analysis method for uncertain structures. Struct Eng Mech, 2005, 20: 713-726 CrossRef Google Scholar
[23] Lin Y, Stadtherr M A. Validated solutions of initial value problems for parametric ODEs. Appl Numer Math, 2007, 57: 1145-1162 CrossRef Google Scholar
[24] Wu J, Zhang Y, Chen L, et al. A Chebyshev interval method for nonlinear dynamic systems under uncertainty. Appl Math Model, 2013, 37: 4578-4591 CrossRef Google Scholar
[25] Jaulin L, Kieffer M, Didrit O, et al. Applied Interval Analysis: With Examples in Parameter and State Estimation, Robust Control and Robotics. Berlin: Springer. 2001, Google Scholar
[26] Moore R E. Methods and Applications of Interval Analysis. Philadelphia: SIAM. 1979, Google Scholar
[27] Wang R H. Numerical Approximation. Beijing: Higher Education Press. 2012, Google Scholar
[28] Jiang E X, Zhao F G, Shu Y F. Numerical Approximation. Shanghai: Fudan University Press. 2008, Google Scholar
[29] Xue Z C, Yu S Z, Yuan J Y. Advanced Mathematics. Beijing: Tsinghua University Press. 2013, Google Scholar
[30] Gao W, Zhang N, Ji J C, et al. Dynamic analysis of vehicles with uncertainty. Proc Inst Mech Eng Part D-J Automobile Eng, 2008, 222: 657-664 Google Scholar
[31] Sandu A, Sandu C, Ahmadian M. Modeling multibody systems with uncertainties. Part I: Theoretical and computational aspects. Multibody Sys Dyn, 2006, 15: 369-391 CrossRef Google Scholar
[32] Sandu C, Sandu A, Ahmadian M. Modeling multibody systems with uncertainties. Part II: Numerical applications. Multibody Sys Dyn, 2006, 15: 241-262 CrossRef Google Scholar
[33] Wu J, Luo Z, Zhang Y, et al. Interval uncertain method for multibody mechanical systems using Chebyshev inclusion functions. Int J Numer Meth Eng, 2013, 95: 608-630 CrossRef Google Scholar
[34] Wu J, Luo Z, Zhang Y, et al. An interval uncertain optimization method for vehicle suspensions using Chebyshev metamodels. Appl Math Model, 2014, 38: 3706-3723 CrossRef Google Scholar
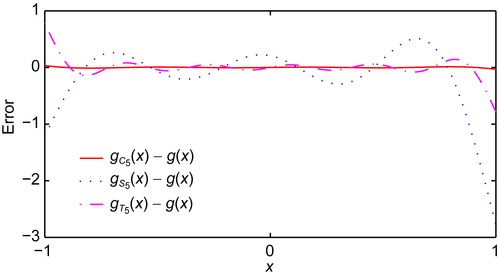
Figure 1
(Color online) Errors of (2+arctan
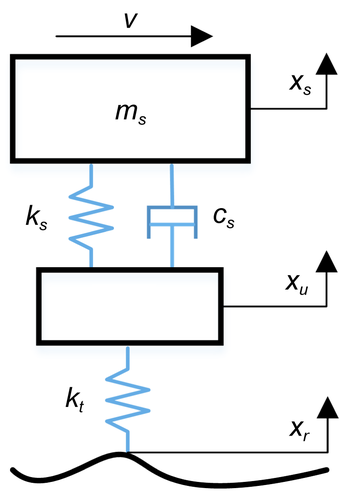
Figure 2
(Color online) Two-degree-of-freedom quarter-car model of the vehicle.
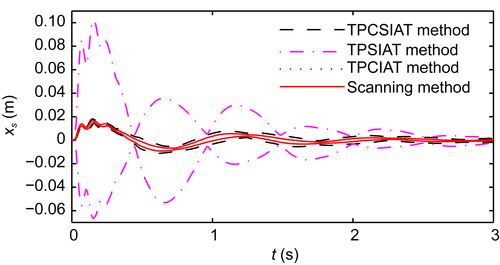
Figure 3
(Color online) Comparison of the sprung mass displacement calculated using the trigonometric methods in the three forms and the scanning method.
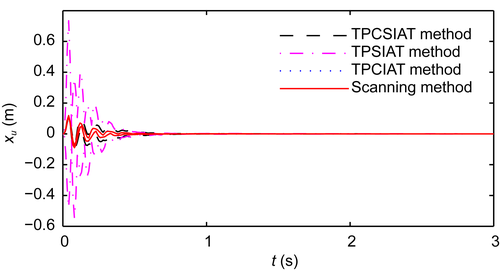
Figure 4
(Color online) Comparison of the unsprung mass displacement calculated using the trigonometric methods in the three forms and the scanning method.
Figure 5
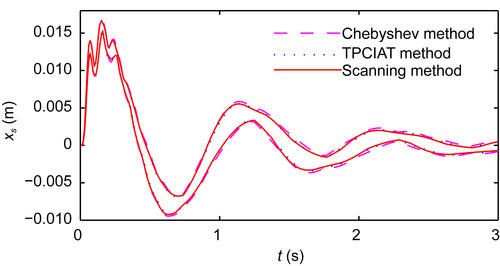
(Color online) Comparison of the sprung mass displacement calculated using the Chebyshev method, the TPCIAT method and the scanning method.
Figure 6
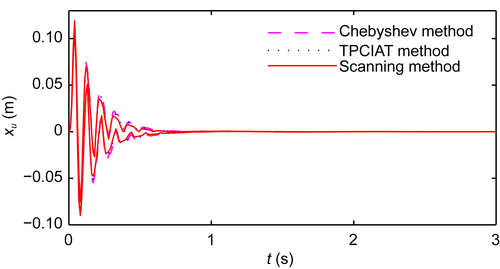
(Color online) Comparison of the unsprung mass displacement calculated using the Chebyshev method, the TPCIAT method and the scanning method.
Figure 7
(Color online) Comparison of the top pendulum angle calculated using the trigonometric methods in the three forms and the scanning method.
Figure 8
(Color online) Comparison of the bottom pendulum angle calculated using the trigonometric methods in the three forms and the scanning method.
Figure 9
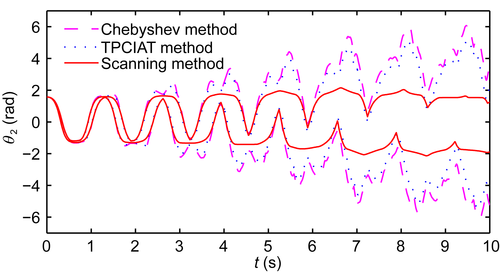
(Color online) Comparison of the top pendulum angle calculated using the Chebyshev method, the TPCIAT method and the scanning method.
Figure 10
(Color online) Comparison of the bottom pendulum angle calculated using the Chebyshev method, the TPCIAT method and the scanning method.
Parameters |
|||||||
Mean values |
375 |
60 |
1000 |
15000 |
200000 |
1.5×106 |
2×107 |
Intervals |
? |
? |
[900,1100] |
[135,165]×102 |
? |
? |
Methods |
Scanning |
TPCSIAT |
TPSIAT |
TPCIAT |
Chebyshev |
Calculation time (s) |
643.5 |
143.4 |
15.4 |
30.4 |
30.9 |
Methods |
Scanning |
TPCSIAT |
TPSIAT |
TPCIAT |
Chebyshev |
Calculation time (s) |
108.1 |
42.0 |
13.5 |
17.4 |
17.5 |



Copyright 2019 Science China Press Co., Ltd. 科学大众杂志社有限责任公司 版权所有
京ICP备18024590号-1

 Download PDF
Download PDF



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}