

This study provides accurate measurements of the wing and body kinematics of three different species of damselflies in free yaw turn flights. The yaw turn is characterized by a short acceleration phase which is immediately followed by an elongated deceleration phase. Most of the heading change takes place during the latter stage of the flight. Our observations showed that yaw turns are executed via drastic rather than subtle changes in the kinematics of all four wings. The motion of the inner and outer wings were found to be strongly linked through their orientation as well as their velocities with the inner wings moving faster than the outer wings. By controlling the pitch angle and wing velocity, a damselfly adjusts the angle of attack. The wing angle of attack exerted the strongest influence on the yaw torque, followed by the flapping and deviation velocities of the wings. Moreover, no evidence of active generation of counter torque was found in the flight data implying that deceleration and stopping of the maneuver is dominated by passive damping. The systematic analysis carried out on the free flight data advances our understanding of the mechanisms by which these insects achieve their observed maneuverability. In addition, the inspiration drawn from this study can be employed in the design of low frequency flapping wing micro air vehicles (MAV’s).
C. Y. Li and Z. Ning for acquiring the insects and videotaping their flights.
we thank Y. Ren
National Natural Science Foundation(CEBT-1313217)
This work was supported by the National Natural Science Foundation
(Grant No. CEBT-1313217), and Air Force Research Laboratory (Grant
No. FA9550-12-1-007). We thank W. Zhang and E.
[1]
R. Dudley,
[2]
F. O. Lehmann, and M. H. Dickinson, J. Exp. Biol.
[3] Muijres F. T., Elzinga M. J., Melis J. M., Dickinson M. H.. Science, 2014, 344: 172 CrossRef Google Scholar
[4]
G. Heide, and K. G. Gotz, J. Exp. Biol.
[5] Hedrick T. L., Cheng B., Deng X.. Science, 2009, 324: 252 CrossRef ADS Google Scholar
[6]
B. Cheng, S. Fry, Q. Huang, and X. Deng, J. Exp. Biol.
[7] Balint C. N.. J . Exp. Biol., 2004, 207: 3813 CrossRef Google Scholar
[8]
F. O. Lehmann, and M. H. Dickinson, J. Exp. Biol.
[9]
J. R. Trimarchi, and A. M. Schneiderman, J. Exp. Biol.
[10] Bender J. A.. J. Exp. Biol., 2006, 209: 3170 CrossRef Google Scholar
[11] Sherman A.. J. Exp. Biol., 2003, 206: 295 CrossRef Google Scholar
[12] Sherman A.. J. Exp. Biol., 2004, 207: 133 CrossRef Google Scholar
[13] Dickinson M. H.. Philos. Trans. R. Soc. B-Biol. Sci., 1999, 354: 903 CrossRef Google Scholar
[14] Bergou A. J., Ristroph L., Guckenheimer J., Cohen I., Wang Z. J.. Phys. Rev. Lett., 2010, 104: 148101 CrossRef Google Scholar
[15] Fry S. N., Sayaman R., Dickinson M. H.. Science, 2003, 300: 495 CrossRef ADS Google Scholar
[16] Muijres F. T., Elzinga M. J., Iwasaki N. A., Dickinson M. H.. J. Exp. Biol., 2015, 218: 864 CrossRef Google Scholar
[17]
C. N. Balint, and M. H. Dickinson, J. Exp. Biol.
[18] Bastian J.. J. Comp. Physiol., 1972, 77: 126 CrossRef Google Scholar
[19] Hedrick T. L.. J. Exp. Biol., 2006, 209: 3114 CrossRef Google Scholar
[20] Zeyghami S., Babu N., Dong H.. Theor. Appl. Mech. Lett., 2016, 6: 107 CrossRef Google Scholar
[21]
D. E. Alexander, J. Exp. Biol.
[22]
H. Wang, L. J. Zeng, H. Liu, and C. Y. Yin, J. Exp. Biol.
[23] S. Zeyghami, and H. Dong, arXiv: 1502.06858. Google Scholar
[24] S. Zeyghami, and H. Dong, “A Body Reorientation Strategy in Insect Takeoff Flight”, AIAA Paper No. 2012-0025, 2012. Google Scholar
[25] Cobb M.. J. Exp. Biol., 2010, 213: vi CrossRef Google Scholar
[26]
G. Rüppell, J. Exp. Biol.
[27]
J. Wakeling, and C. Ellington, J. Exp. Biol.
[28]
M. H. Dickinson, F. Lehman, and K. G. Gotz, J. Exp. Biol.
[29] Zhang Y., Sun M.. Acta. Mech. Sin., 2010, 26: 371 CrossRef ADS Google Scholar
[30] Koehler C., Liang Z., Gaston Z., Wan H., Dong H.. J. Exp. Biol., 2012, 215: 3018 CrossRef Google Scholar
[31] H. Dong, Z. Liang, H. Wan, C. Koehler, and Z. Gaston, “An integrated analysis of a dragonfly in free flight”, AIAA Paper No. 2010-4390, 2010. Google Scholar
[32] Jantzen B., Eisner T.. Proc. Natl. Acad. Sci., 2008, 105: 16636 CrossRef ADS Google Scholar
[33] Pesavento U., Wang Z. J.. Phys. Rev. Lett., 2004, 93: 144501 CrossRef ADS Google Scholar
[34] Dong H., Mittal R., Najjar F. M.. J. Fluid Mech., 2006, 566: 309 CrossRef ADS Google Scholar
[35] Mittal R., Dong H., Bozkurttas M., Najjar F. M., Vargas A., Von Loebbecke A.. J. Comp. Phys., 2008, 227: 4825 CrossRef ADS Google Scholar
[36] Cheng X., Sun M.. Sci. Rep., 2016, 6: 25706 CrossRef ADS Google Scholar
[37] Dickinson M. H.. Integr. Comp. Biol., 2005, 45: 274 CrossRef Google Scholar
[38] Ros I. G., Badger M. A., Pierson A. N., Bassman L. C., Biewener A. A.. J. Exp. Biol., 2015, 218: 480 CrossRef Google Scholar
Figure 1
(Color online) Three species of damselfly. (a) A representative of each one of the three species of damselfly in this experiment are shown side by side for comparison. Damselfly #1-
Figure 2
(Color online) Definition of the wing and body coordinate systems and validation of quasi-steady model. (a)
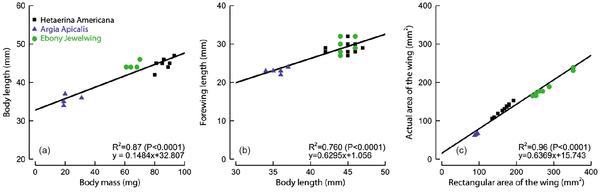
Figure 3
(Color online) Morphology of three damselfly species. (a) Body length was found to be strongly correlated to the body mass; (b) the length of the wing increases directly with the length of the body; (c) the actual area of the wing is strongly correlated with the product of the wing length and the maximum wing chord for both fore and hindwings.
Figure 4
(Color online) Damselfly body motion during an aerial yaw turn. (a) Sequence of images of the yaw turn of damselfly #3. The selected images were recorded by downward facing camera. The body orientation is shown at the beginning and end of each flapping stroke of the forewings. Radius of turn,
Figure 5
(Color online) Wing kinematics of damselflies yaw turn.
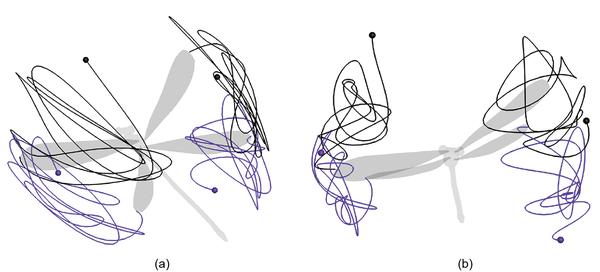
Figure 6
(Color online) Wing tip trajectory in the body fixed coordinate system for damselfly #2. (a) and (b) respectively show the perspective and back view of the wing tip trajectories. The fore and hind wings’ trajectories are shown by black and purple lines. The initial position of the wing tip is shown by a sphere. It is evident that the wing trajectory is not periodic and varies significantly during the yaw turn.
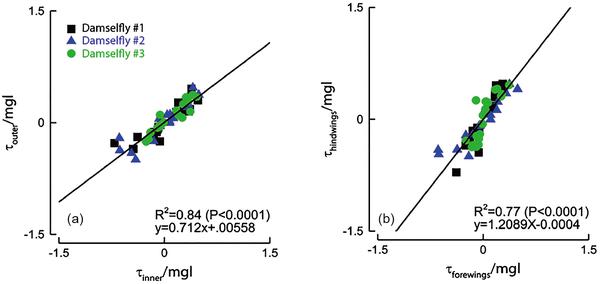
Figure 7
(Color online) Correlation between the kinematics of bilateral wings. The half-stroke-averaged kinematics of the outer wings is plotted against the inner wings for all three flights. For clarity the data points form damselflies #1, #2 and #3 are indicated by black, purple and green, respectively. The linear regression line is shown in solid black. (a) The flapping amplitudes of the inner and outer wings were correlated, with inner wings having slightly higher amplitude than the outer wings. Similarly, the average magnitude of the deviation and the pitch angles of the inner wings were found to be higher than that of the outer wings; (b) the rates of change in all three Euler angles of the wings were bilaterally correlated, as well. The data also shows that the velocity of the inner wings is in general higher than that of the outer wings.
Figure 8
(Color online) Aerodynamic yaw torque.
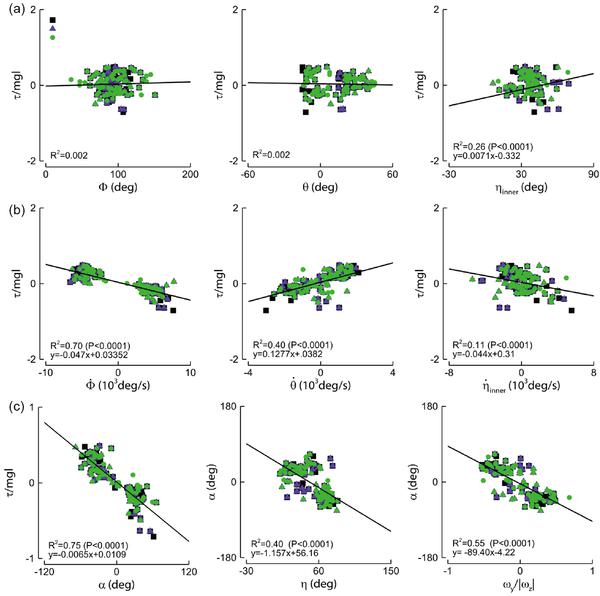
Figure 9
(Color online) Mechanism of torque generation in damselfly yaw turns.
Species |
Sample size |
Body mass (mg) |
Body length (mm) |
Forewing span (mm) |
Hindwing span mm) |
Forewing chord (mm) |
Hindwing chord (mm) |
Forewing area (mm2) |
Hindwing area (mm2) |
7 |
86±5 |
45±2 |
30±1 |
28±1 |
6±1 |
6±1 |
136±13 |
126±13 |
|
4 |
22±6 |
35±1 |
23±1 |
23±1 |
4±0 |
4±0 |
65±2 |
65±3 |
|
4 |
66±4 |
44±1 |
30±2 |
29±2 |
9±1 |
10±1 |
190±29 |
188±35 |
Species |
Turn amplitude (°) |
Maneuver duration (s) |
Maneuver duration (wingbeats) |
Max yaw velocity (103 °/s) |
Avg turn radius (body length) |
Average yaw velocity (°/wingbeat) |
|
Accel. phase |
Decel. phase |
||||||
Damselfly #1 |
160 |
0.185 |
5 |
1.2 |
0.17 |
25 |
31 |
Damselfly #2 |
170 |
0170 |
5 |
1.7 |
0.65 |
33 |
38 |
Damselfly #3 |
55 |
0140 |
2 |
0.5 |
0.90 |
28 |
32 |
110 |
0.170 |
3 |
0.8 |
0.43 |
25 |
44 |
|



Copyright 2019 Science China Press Co., Ltd. 科学大众杂志社有限责任公司 版权所有
京ICP备18024590号-1

 Download PDF
Download PDF





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}