

A simplex method of orbit determination (SMOD) is presented to
solve the problem of orbit determination for maneuvering satellites
subject to small and continuous thrust. The objective function is
established as the sum of the
National Natural Science Foundation of China(11503096)
State Key Laboratory of Geo-information Engineering(SKLGIE2014-M-2-3)
This work was supported by the National Natural Science Foundation of China (Grant No. 11503096), and the State Key Laboratory of Geo-information Engineering (Grant No. SKLGIE2014-M-2-3).
[1] Zhang Y.. J. Rocket Propul., 2005, 31: 27 CrossRef Google Scholar
[2] Kozubskii K. N., Murashko V. M., Rylov Y. P., Trifonov Y. V., Khodnenko V. P., Kim V., Popov G. A., Obukhov V. A.. Plasm. Phys. Rep., 2003, 29: 251 CrossRef ADS Google Scholar
[3] King L. B., Gallimore A. D., Marrese C. M.. J. Propul. Power, 1998, 14: 327 CrossRef Google Scholar
[4] C. E. Garner, M. D. Rayman, and J. R. Brophy, In-flight operation of the Dawn ion propulsion system through start of the Vesta cruise phase, AIAA Paper No. 2009-5091, 2009. Google Scholar
[5] Zhang T. P., Zhang X. E.. Vacuum Cryogen., 2013, 19: 187 CrossRef Google Scholar
[6]
G. Beutler, M. R. Drinkwater, R. Rummel, and R. Von Steiger,
[7] Beutler G., Brockmann E., Gurtner W., Hugentobler U., Mervart L., Rothacher M.. Manuscr. Geod., 1994, 19: 367 CrossRef Google Scholar
[8] Xu T. H., Jiang N., Sun Z. Z.. Sci. China-Phys. Mech. Astron., 2012, 55: 892 CrossRef ADS Google Scholar
[9] Cao F., Yang X. H., Li Z. G., Sun B. Q., Kong Y., Chen L., Feng C.. Adv. Space Res., 2014, 54: 1828 CrossRef ADS Google Scholar
[10]
H. S. Lin, H. Huang, G. Liu, and H. E. Bing, Electron. Opt. & Control
[11] Guo R., Li X. J., Zhou J. H., Liu L., Huang Y.. J. Geomat. Sci. Technol., 2013, 30: 465 CrossRef Google Scholar
[12] Zhang Z. K., Chen S. J., Du L., Danzeng Q. Y., Wang H., Zhang Q. F.. J. Astronaut., 2014, 35: 506 CrossRef Google Scholar
[13] Li H. N., Li J. S., Huang Y. X.. Sys. Eng. Electron., 2010, 32: 1957 CrossRef Google Scholar
[14] Song X. Y., Jia X. L., Jiao W. H., Mao Y.. Geomat. Inf. Sci. Wuhan Univ., 2009, 34: 573 CrossRef Google Scholar
[15] Zhang Y., Chen M., Duan J. F., Xie J. F.. Mann. Spacefl., 2013, 19: 45 CrossRef Google Scholar
[16] Spendley W., Hext G. R., Himsworth F. R.. Technometrics, 1962, 4: 441 CrossRef Google Scholar
[17] Nelder J. A., Mead R.. Comp. J., 1965, 7: 308 CrossRef Google Scholar
[18] Wu Z., Gou L. F.. Comp. Simul., 2014, 31: 64 CrossRef Google Scholar
[19]
J. F. Chen, Z. W. Ren, and X. N. Fan, in
[20]
F. G. Yuan, X. H. Zhang, and J. W. Yang, J. Suzhou U. Sci. Technol. (Nat. Sci.)
[21] Liao L. W., Cui Y. D., Chen T., Qiu C.. Metall. Anal., 2005, 25: 7 CrossRef Google Scholar
[22] Juang C. F., Chung I. F., Hsu C. H.. Fuzzy Sets Syst., 2007, 158: 1979 CrossRef Google Scholar
[23] Xiao H., Shao Y., Zhou X., Wilcox S. J.. Measurement, 2014, 55: 25 CrossRef Google Scholar
[24] Ye B., Zhang H. B., Wu J.. J. Astronaut., 2009, 30: 1371 CrossRef Google Scholar
[25] Clemen C.. Acta Astronaut., 2002, 51: 457 CrossRef ADS Google Scholar
[26]
Q. L. Kong, J. Y. Guo, and C. M. Zhao, Sci. Surv. Map.
[27]
B. D. Tapley, E. S. Bob, and H. B. George,
[28]
G. C. Xu, and J. Xu,
[29] Huang Y., Hu X. G., Zhang X. Z., Jiang D. R., Guo R., Wang H., Shi S. B.. Chin. Sci. Bull., 2011, 56: 2765 CrossRef Google Scholar
[30]
J. S. Li,
[31]
J. Zhu, J. S. Wang, J. R. Chen, and Y. F. He, J. Astronaut.
[32]
J. Zhu, J. R. Chen, G. Zeng, J. Li, and J. S. Wang, in
[33] M. L. Psiaki, in Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2001), Salt Lake City, 11-14 September, 2001, pp. 2838-2850. Google Scholar
[34] Mao W. L., Chen A. B.. AEU - Int. J. Electron. Commun., 2009, 63: 665 CrossRef Google Scholar
[35]
Y. J. Xie,
[36]
M. Sahmoudi, M. G. Amin, and R. Jr Landry, in
[37] Lemmens S., Krag H.. J. Guidance Control Dyn., 2014, 37: 860 CrossRef ADS Google Scholar
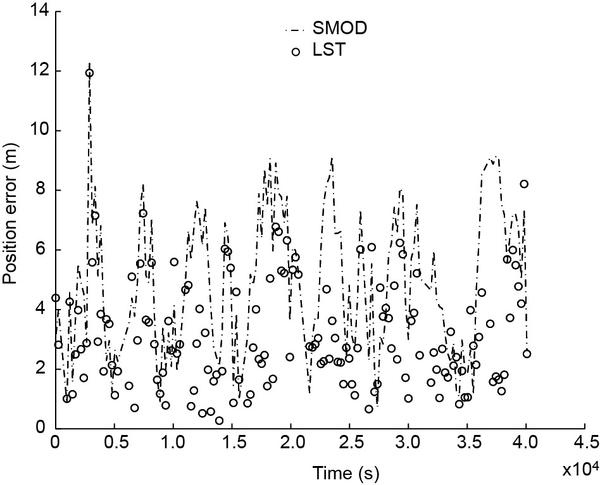
Figure 1
Position errors obtained for the SMOD and the LST for a satellite in LEO.
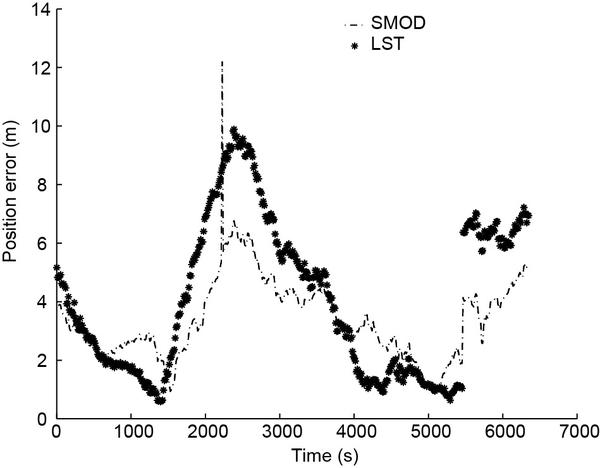
Figure 2
Position errors obtained for the SMOD and the LST for a satellite in GEO.
Figure 3
Position errors obtained for the SMOD for a satellite in LEO under pulse control for
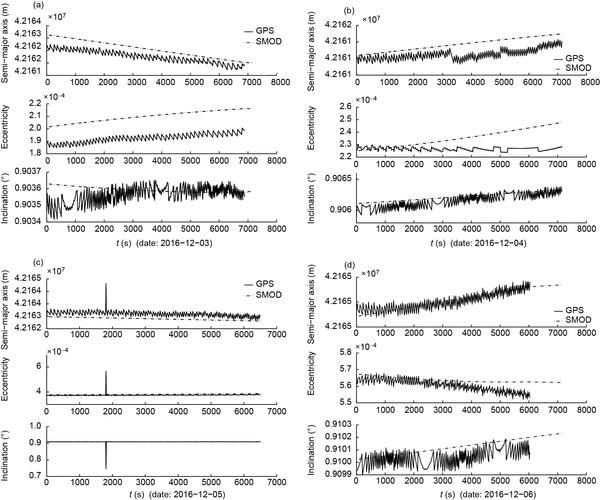
Figure 4
Variation of the semi-major axis, eccentricity, and inclination of the mean orbit obtained by the SMOD and GPS for the Shijian-17 satellite in GEO during the
|
Perturbation types |
Perturbation source |
|
Conservative perturbation |
Earth gravity |
|
N-body, including Solar, lunar, Venus and Jupiter gravitations |
|
|
Solid Earth tides |
|
|
Ocean tides |
|
|
Earth rotation parameter |
|
|
Relativistic perturbation |
|
|
Non-conservative perturbation |
Atmospheric drag (for LEO satellite) |
|
Earth albedo radiation |
|
|
Solar radiation pressure (for GEO satellite) |
Initial orbital errors | Output parameters | |||||
(km) | NUM | OFV | ||||
Error 1 | 10.0 | 0.0001 | 0.001 | 0.01 | 526 | 912880 |
Error 2 | 5.0 | 0.00015 | 0.0015 | 0.015 | 1336 | 0.086 |
Error 3 | 1.0 | 0.0002 | 0.002 | 0.02 | 593 | 0.0043 |
Error 4 | ?0.5 | 0.0002 | 0.002 | 0.02 | 1105 | 0.16 |
Error 5 | 0.1 | 0.0005 | 0.005 | 0.05 | 735 | 59.53 |
Running time (min) | NUM | OFV | |
1 | 3.32 | 197 | 3.44 |
2 | 10.51 | 711 | 0.36 |
3 | 2.92 | 159 | 0.51 |
4 | 8.63 | 584 | 0.07 |
5 | 14.58 | 991 | 0.08 |
6 | 21.58 | 1486 | 0.02 |
7 | 19.12 | 1317 | 0.002 |
8 | 20.55 | 1418 | 0.03 |
a)Here givens
the operating environment for the program. The computer is configured
with an Intel(R) Core (TM) processor,
Method | Date | Position error (m) | Estimated electronic propulsive acceleration/empirical
acceleration | ||||||
R | T | N | Total | R | T | N | |||
SMOD | 3rd | 9.45 | 0.99 | 6.12 | 11.31 | ?1.40 | 0.10 | 0.20 | |
4th | 8.61 | 4.39 | 4.00 | 10.46 | ?1.40 | 0.30 | 0.60 | ||
5th | 4.04 | 1.02 | 6.95 | 8.10 | – | – | – | ||
6th | 3.00 | 1.41 | 2.74 | 4.30 | ?1.30 | 0.30 | 0.30 | ||
LST | 3rd | 19.69 | 1.89 | 4.53 | 20.29 | ?7.84 | 0.74 | 0.32 | |
4th | 16.57 | 6.24 | 4.67 | 18.31 | ?2.35 | 0.84 | 1.94 | ||
5th | 7.05 | 1.41 | 3.64 | 8.06 | – | – | – | ||
6th | 6.84 | 1.68 | 7.68 | 10.43 | ?1.24 | 0.59 | 0.15 | ||



Copyright 2019 Science China Press Co., Ltd. 科学大众杂志社有限责任公司 版权所有
京ICP备18024590号-1

 Download PDF
Download PDF

{kind=link}
{kind=link}
{kind=link}
{kind=link}